Arduino: Embarcando com o Mega 2560
No campo da Engenharia de Software e da Computação, muitas vezes ficamos confinados às abstrações de alto nível. No entanto, o verdadeiro domínio da tecnologia também exige a compreensão da interface entre o código e o mundo físico. Neste artigo, iremos explorar conceitos de programação em baixo nível com a ajuda do Arduino, uma plataforma que revolucionou o ensino de sistemas embarcados e a prototipagem eletrônica.
O que é o Arduino?
O Arduino não é apenas uma “placa de circuito”, mas sim uma plataforma de computação física de código aberto (open-source). Ela combina hardware (placas baseadas em microcontroladores) e software (uma Unidade de Desenvolvimento Integrada – IDE). A Figura 1 apresenta uma foto da versão mais famosa da placa, o Uno R3, com descrição da anatomia do circuito impresso e seus componentes.
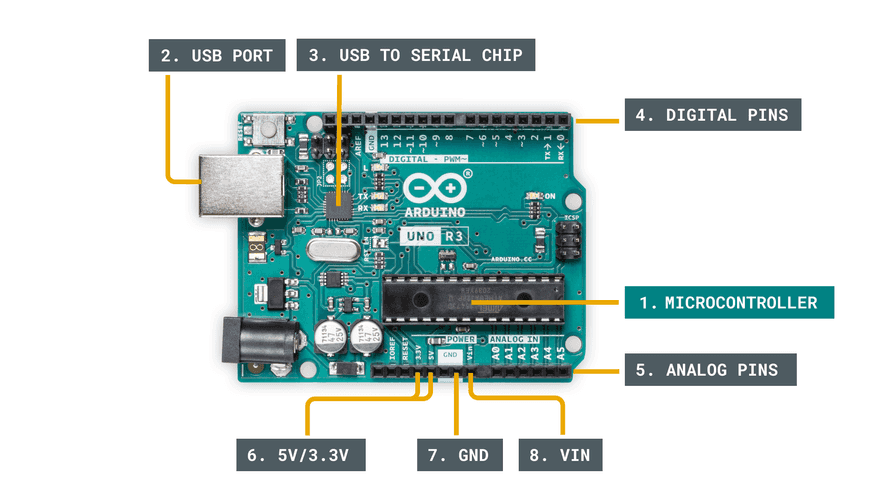
Fonte: Arduino (2025b).
De acordo com Banzi e Shiloh (2014), o Arduino foi concebido para permitir que designers e artistas — mesmo sem formação profunda em engenharia — pudessem criar objetos interativos. No contexto acadêmico, ele serve como uma ferramenta pedagógica interessante para o estudo de Arquitetura de Computadores e Sistemas de Tempo Real.
Características Fundamentais
Podemos citar como uma das principais características da ferramenta o fato dela ser open hardware, permitindo que qualquer pessoa fabrique suas próprias versões ou derivados por meio do acesso aos desenhos esquemáticos públicos das placas.
Além disso, destacamos que o conjunto de microcontroladores e pinos de I/O (Input/Output) é robusto o suficiente para executar as instruções armazenadas na memória Flash e interagir com as interfaces que permitem a leitura de sensores (entrada) e o controle de atuadores, como motores e LEDs (saída).
Versões do Arduino
De acordo com a página oficial, ao longo de anos foram lançados mais de 100 produtos de hardware voltados à plataforma (Arduino, 2025a). Aqui, apresentaremos uma breve descrição apenas dos principais modelos utilizados no Brasil.
Modelos Nano
A família Nano é caracterizada por placas com dimensões bem reduzidas. Ela varia desde a placa Nano, mais básica e acessível, até a Nano 33 BLE Sense, que é mais completa e já vem integrada com módulos de comunicação Bluetooth® e Wi-Fi®.
Esses modelos costumam vir com sensores integrados, tais como temperatura/umidade, pressão, gestos, microfone e muito mais. Além disso, as placas suportam programação com MicroPython e códigos de aprendizado de máquina. Na Figura 2 temos exemplos de placas que compõem a família.
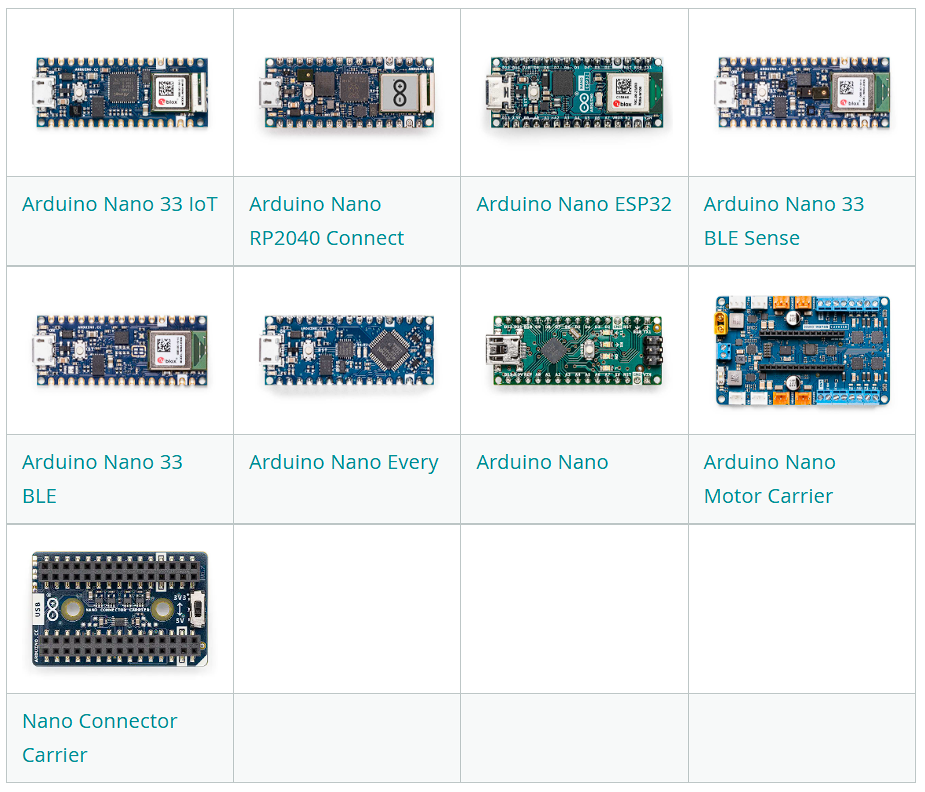
Fonte: Arduino (2025a).
Modelos Uno
Nesta família de placas encontraremos o lendário Arduino UNO R3 ou Arduino UNO R4 WiFi. Segundo a página eletrônica Arduino (2025a), essas placas são consideradas a “espinha dorsal” dos projetos feitos por makers e entusiastas amadores com Arduino. Elas foram – e ainda são – um sucesso de vendas e de utilização. Na Figura 3 elencamos exemplos de placas que compõem a família.
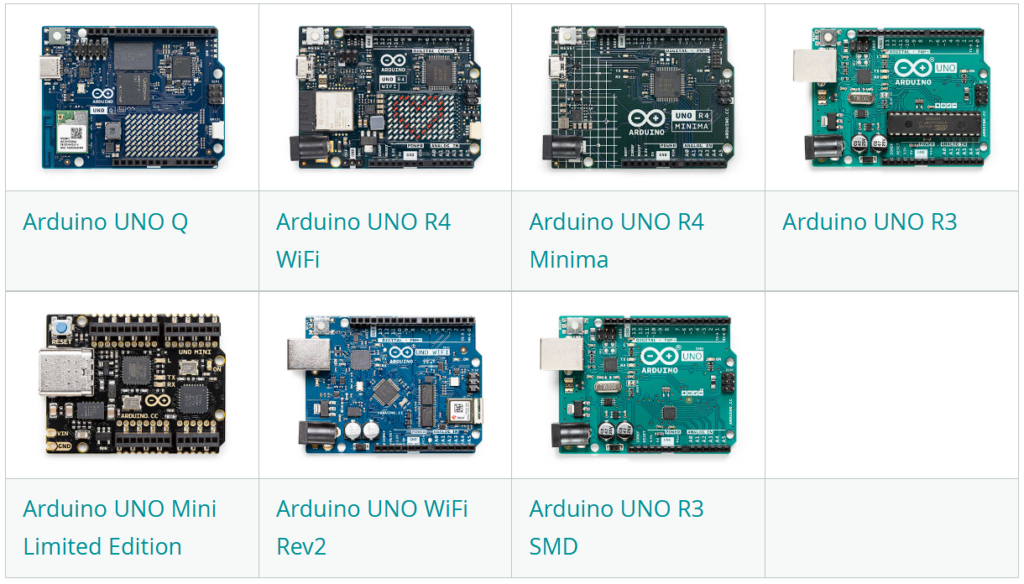
Fonte: Arduino (2025a).
Modelos Mega
No conjunto conhecido como Mega, temos as placas que oferecem mais poder de computação e pinos GPIO para aqueles projetos que demandam mais. Na Figura 4 apresentamos fotos das placas que compõem a família.
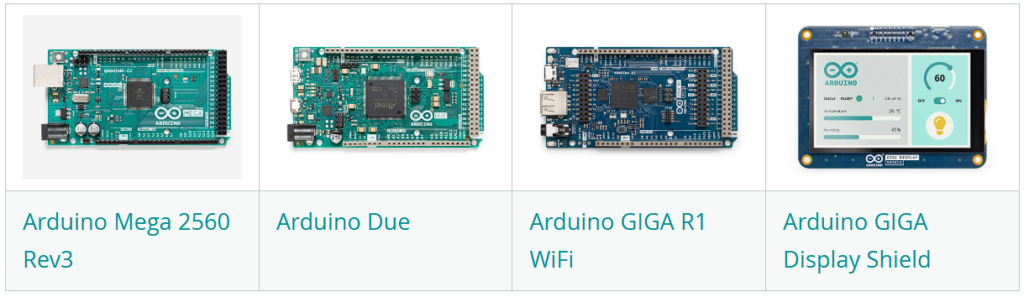
Fonte: Arduino (2025a).
Enquanto o Arduino Uno é o padrão para iniciantes, o Arduino Mega 2560 é o “cavalo de batalha” para projetos complexos que exigem maior capacidade de processamento e conectividade. A partir deste ponto, focaremos nos detalhes da placa Mega 2560 Rev3.
Arduino Mega 2560 Rev3
Baseado no microcontrolador ATmega2560, o modelo opera sob a arquitetura Harvard, onde as memórias de programa e dados são fisicamente separadas. Conforme a documentação oficial, suas principais especificações incluem (Arduino, 2024):
- Tensão de Operação: 5V
- Pinos Digitais: 54 (dos quais 15 podem fornecer saída PWM)
- Entradas Analógicas: 16
- Memória Flash: 256 KB (significativamente superior aos 32 KB do Uno)
- SRAM: 8 KB (para armazenamento de variáveis em tempo de execução)
- EEPROM: 4 KB (memória não volátil para dados persistentes)
Anatomia da Memória no Arduino Mega 2560
Diferente de um computador convencional que funciona baseado na arquitetura de Von Neumann (o programa e seus dados dividem o mesmo espaço de memória RAM), o Arduino Mega 2560 segmenta tudo rigidamente para garantir performance e segurança em tempo real. Por isso, o circuito impresso na placa possui três tipos diferentes de memória, que descreveremos a seguir.
Memória Flash (256 KB)
A memória flash é um tipo não volátil de memória, ou seja, ela não apaga o conteúdo ao desligar. É aqui que o código compilado será armazenado até que seja substituído por outro. Nela são armazenados o bootloader e o nosso sketch (programa carregado). Infelizmente, é uma memória lenta para escrita e possui um ciclo de vida limitado (cerca de 10.000 ciclos de gravação).
Uma dica de codificação para quem utiliza bastante strings constantes (ex: menus extensos em um LCD) é utilizar a macro F() (ex: Serial.print( F("Olá") );). Isso forçará a string a ficar na Flash, economizando a preciosa SRAM.
SRAM (8 KB)
A Static Random Access Memory – SRAM é volátil e extremamente rápida. É conhecida como espaço de trabalho do programa em execução. Ela armazena variáveis globais, a pilha (stack) para chamadas de função e interrupções e o heap para alocação dinâmica.
Contudo, há uma grade limitação nessa versão da placa. 8 KB é uma quantidade generosa para Arduino, mas minúscula para padrões modernos. Se você criar arrays gigantes ou abusar de recursividade, é bem possível que ocorra um stack overflow (estouro de pilha), causando comportamentos erráticos ou o travamento do microcontrolador.
EEPROM (4 KB)
Funciona como um pequeno “disco rígido” interno, sendo utilizada para salvar configurações que devem sobreviver a um reboot (ex: calibração de sensores, senhas de Wi-Fi, IDs de dispositivos etc.). A leitura é rápida, mas a escrita é lenta e desgasta a célula de memória (limite de aproximadamente 100.000 ciclos).
Para condensar, a Tabela 1 sintetiza os tipos de memória disponíveis relacionando-os com suas capacidades, características e usos.
| Tipo de Memória | Capacidade | Volátil? | Uso Principal |
| Flash | 256 KB | Não | Código fonte e constantes PROGMEM. |
| SRAM | 8 KB | Sim | Variáveis, execução e cálculos. |
| EEPROM | 4 KB | Não | Dados de configuração persistentes. |
Benefícios e Trade-offs
Como engenheiros, não podemos escolher ferramentas por “gosto pessoal”, mas por análise técnica. O Mega 2560 possui vantagens claras, mas também limitações importantes. Destacamos-os a seguir.
Vantagens
- Expansibilidade: Com 54 pinos de I/O, ele é ideal para projetos de robótica complexos, como impressoras 3D e drones, que exigem o controle de múltiplos motores e leitura de diversos sensores simultaneamente.
- Múltiplas interfaces seriais: Ele possui 4 portas UART (Hardware Serial), facilitando a comunicação simultânea com dispositivos como módulos GPS, Bluetooth e Wi-Fi, sem a necessidade de emulação via software.
- Capacidade de código: A memória Flash de 256 KB permite a implementação de algoritmos mais robustos e bibliotecas pesadas.
Desvantagens
- Tamanho da placa: O tamanho físico é consideravelmente maior que o Uno ou o Nano, o que pode ser um problema em projetos com restrição de espaço (Ex: wearables).
- Consumo de energia: Devido ao maior número de componentes e à arquitetura do ATmega2560, ele consome mais corrente elétrica do que versões menores, o que impacta a autonomia em projetos alimentados por bateria.
- Clock limitado: Apesar do nome “Mega”, ele ainda opera a 16 MHz. Para tarefas de processamento de sinal intensivo ou visão computacional, ele é superado por placas baseadas em ARM, como o Arduino Due ou ESP32.
Exemplo de código
Como vimos acima, a SRAM é a memória utilizada para execução dos códigos e armazenamento das variáveis durante o uso do Arduino. Portanto, monitorar a SRAM em tempo real torna-se uma técnica de depuração avançada interessante para ampliar a experiência de desenvolvedores de sistemas embarcados.
Em sistemas com recursos limitados, como o ATmega2560, o “silêncio” do hardware após um crash é o maior inimigo. Logo, ter esses dados na porta serial é como ter uma caixa-preta de um avião.
Na Figura 5 apresentamos uma opção de implementação técnica para medir a memória livre entre o Heap (onde dados dinâmicos residem) e o Stack (onde as variáveis locais e endereços de retorno são empilhados).
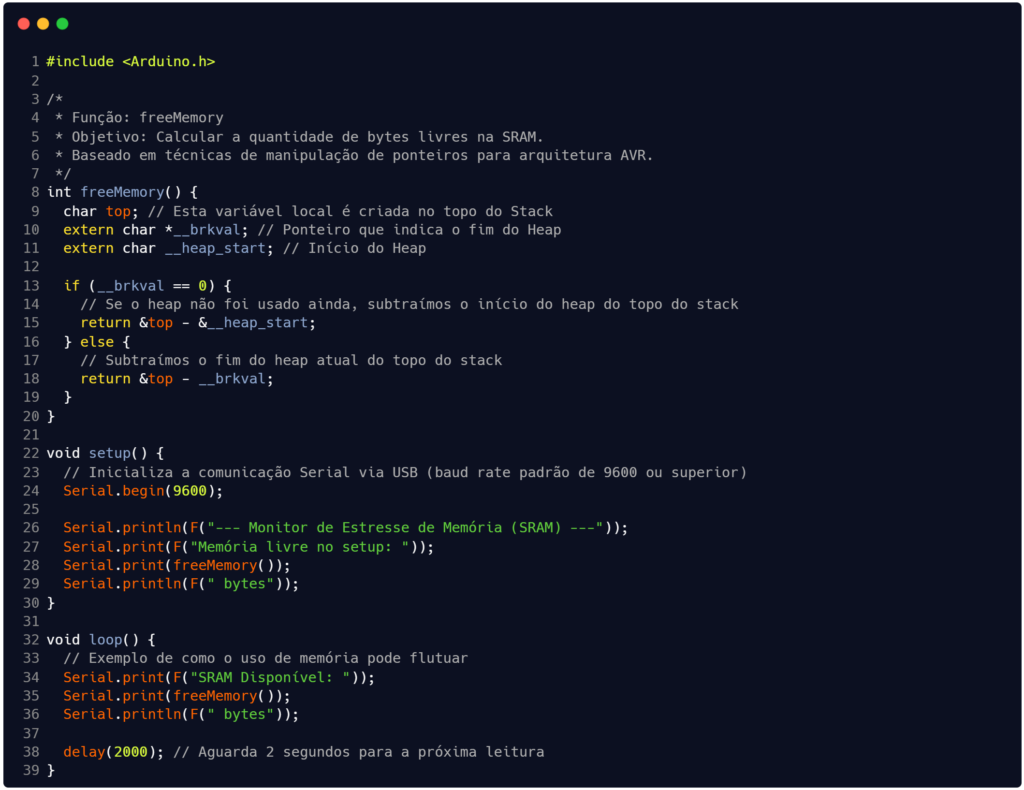
Este código utiliza ponteiros de baixo nível para calcular a distância entre o topo da pilha e o final do heap. No ATmega2560, a SRAM cresce em direções opostas: o Heap cresce “para cima” e o Stack “para baixo” (McRoberts, 2015). Portanto, o espaço entre eles é a sua memória livre real.
Note que usei no código Serial.print( F("...") ). Como discutimos anteriormente, o Macro F() mantém as strings estáticas na Flash, impedindo que elas consumam a SRAM que estamos tentando medir (Banzi; Shiloh, 2014).
Os símbolos __brkval e __heap_start são fornecidos pelo linker do GCC para a arquitetura AVR (Mazidi; Naimi; Naimi, 2011). Eles nos permitem “espiar” a organização interna da memória sem a necessidade de um sistema operacional.
O comando Serial.begin(9600) configura o hardware UART do ATmega2560 para converter os dados lógicos em sinais elétricos que o chip conversor USB-Serial da placa traduz para o seu computador.
Conforme aponta Tanenbaum (2013), a visibilidade do estado interno do sistema é crucial para a confiabilidade. Se você notar que o valor retornado por freeMemory() está diminuindo progressivamente a cada ciclo do loop(), você detectou um Memory Leak (vazamento de memória). No Arduino Mega, isso geralmente acontece por dois motivos: 1) criação excessiva de objetos String; ou 2) alocação de memória com new ou malloc sem o respectivo delete ou free.
Conclusão
O Arduino Mega 2560 é a escolha lógica quando o seu projeto “transborda” as capacidades do Uno. No entanto, lembre-se do que diz a boa prática de engenharia: use apenas o necessário. Não faz sentido utilizar um Mega para acender um único LED; a eficiência técnica também reside na escolha econômica e energética da arquitetura.
Referências
ARDUINO. Arduino Mega 2560 Rev3. 2024. Disponível em: https://docs.arduino.cc/hardware/mega-2560. Acesso em: 27 mar. 2026.
_________. Arduino Hardware. 2025a. Disponível em: https://www.arduino.cc/en/hardware/. Acesso em: 27 mar. 2026.
_________. Getting Started with Arduino. 2025b. Disponível em: https://docs.arduino.cc/learn/starting-guide/getting-started-arduino/. Acesso em: 27 mar. 2026.
BANZI, Massimo; SHILOH, Michael. Getting Started with Arduino. 3. ed. Sebastopol: Maker Media, 2014.
MAZIDI, Muhammad Ali; Naimi, Sarmad; Naimi, Sepehr. The AVR Microcontroller and Embedded Systems: Using Assembly and C. Pearson, 2011.
MCROBERTS, Michael. Arduino básico. 2. ed. São Paulo: Novatec, 2015.
TANENBAUM, Andrew S. Organização Estruturada de Computadores. 6. ed. São Paulo: Pearson, 2013.